Как подключить шаговый двигатель от принтера
Как подключить шаговый двигатель от принтера
Как подобрать шаговый двигатель для станка ЧПУ. ШД из принтера.

Любая разработка начинается с выбора компонентов. При разработке ЧПУ станка очень важно правильно подобрать шаговые двигателя . Если у вас есть деньги на покупку новых двигателей, в таком случае нужно определить рабочее напряжения и мощность двигателя. Я купил себе для второго ЧПУ станка шаговые двигателя вот такие: Nema17 1.7 А.
Если у вас нет достаточно денег или вы просто пробуете свои силы в данной сфере. То вы скорее всего будите использовать двигателя из принтеров . Это самый недорогой вариант. Но тут Вы столкнетесь с рядом проблем. У двигателя может быть 4, 5, 6, 8 — проводов для подключения. Как их подключить к драйверам L298n и СNC shield.
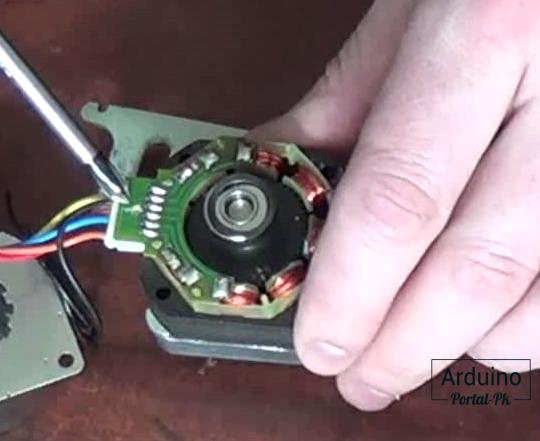
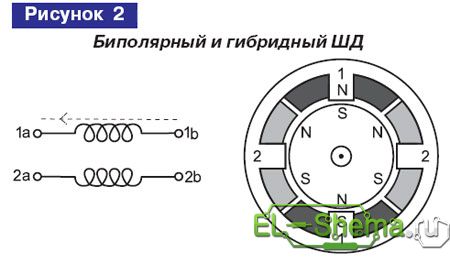
Давайте разберемся по порядку. Какие шаговые двигателя бывают. Если вы видите четное количество выводов это биполярный шаговый двигатель . Расположение обмотки для данного двигателя вот такое.
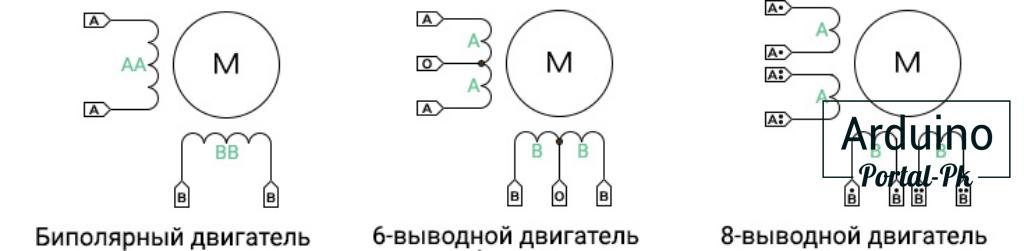
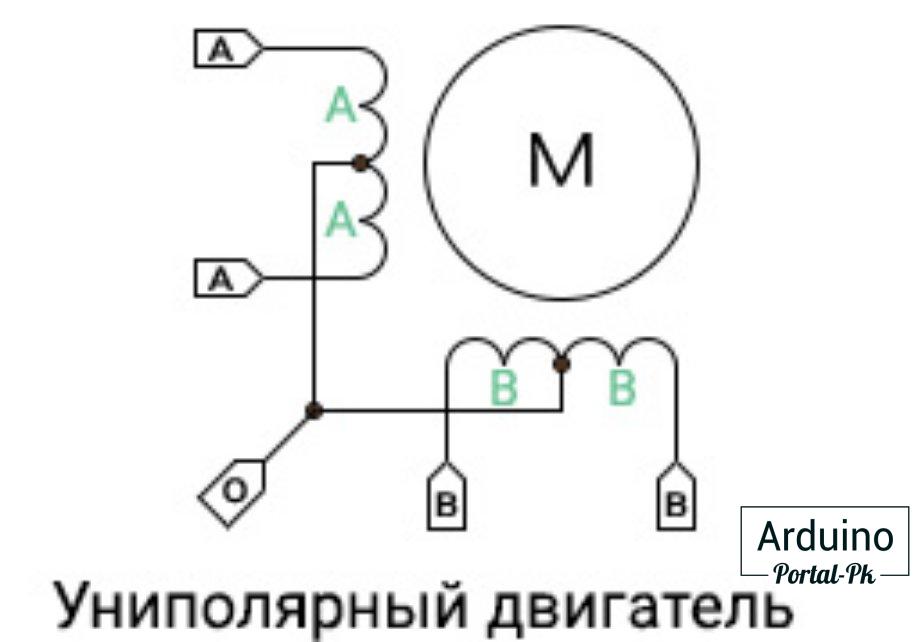
Если у двигателя 5 выводов, это униполярный шаговый двигатель . Вот так выгладит его схема.
Наши драйвера рассчитаны на двигателя с 4 выводами . Как быть? Как их подключить?
Биполярные ШД с 6-ю выводами подключаются к драйверу двумя способами:
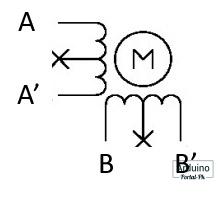
В данном случае ШД имеет момент в 1.4 раза больше. Момент более стабилен на низких частотах.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток – 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R – именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность ШД — I*2 * R
При последовательном включении обмоток потребляемая мощность становится Iпосл.*2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому I*2 * R = Iпосл.*2 * 2* R, откуда
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
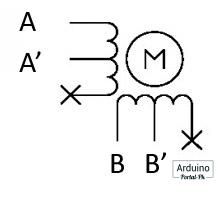
Во втором случае момент более стабилен на высоких частотах. Параметры ШД при таком подключении соответствуют заявленным в datasheet, (момент, ток), момент более стабилен на высоких частотах .
Униполярный шаговый двигатель можно переделать.
Для этого нужно разобрать шаговый двигатель и перерезать провод соединяющий центр обмоток. И при подключении общий провод подключать ни куда не нужно.
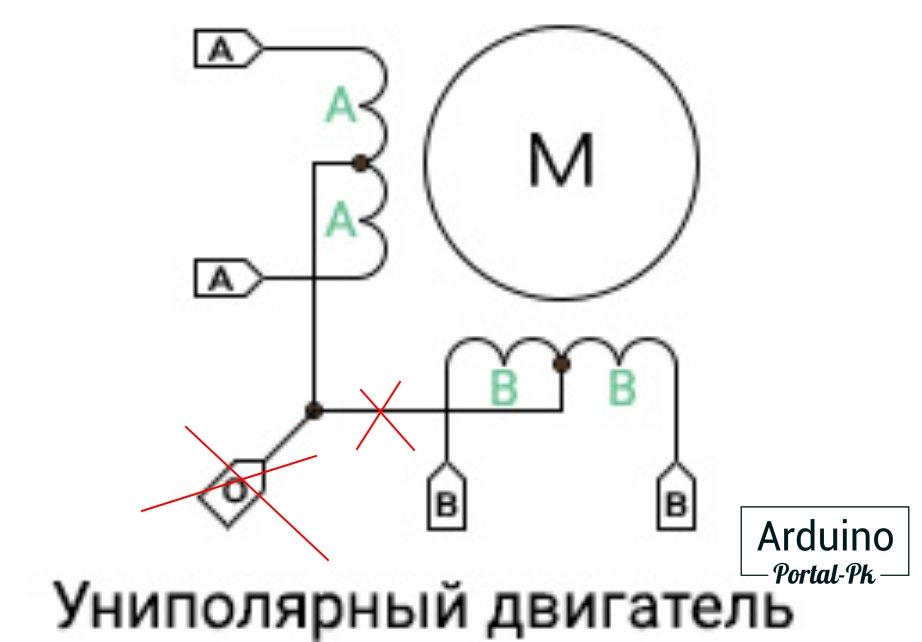
В итоге у нас получается биполярный двигатель с 4 выводами.
Шаговые двигателя с 8-ю выводами можно подключить тремя способами.
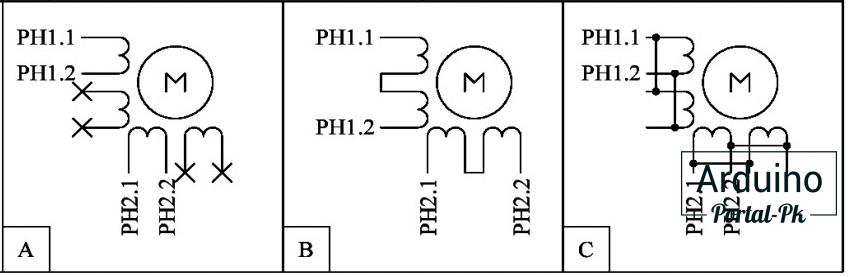
Подключение А – шаговик работает с характеристиками, заявленными в описании (момент, ток), момент более стабилен на высоких частотах.
Подключение B – момент ↑1.4 раза, момент более стабилен на низких частотах (относительно А).
Подключение C – момент ↑1.96 раза, момент более стабилен на высоких частотах (относительно А).
Вот мы и решили проблему подключения шаговых двигателей. Но не все двигателя у нас заработают. Нужно еще определить рабочее напряжение двигателей. Самый правильный способ это найти datasheet. Так все параметры есть. Но не ко все двигателя из принтера можно найти datasheet. В таких случаях я пользуюсь вот такой таблицой .
Шаговый двигатель от старого принтера как генератор
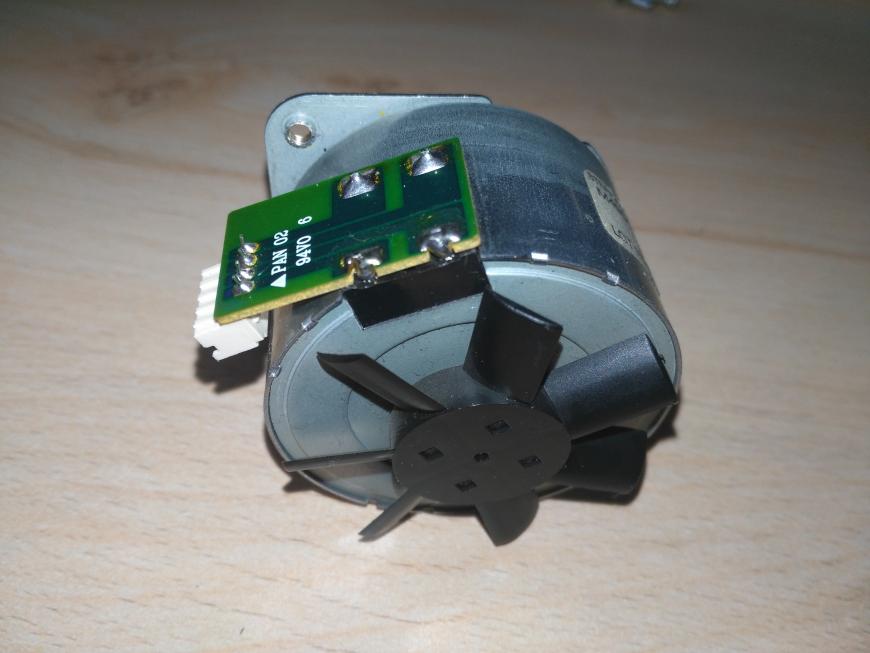
Разобрав старый принтер мне достался вот такой красавец:

Что это? Шаговый двигатель, двигателей такого типа полно в принтерах и CD/DVD’ромах и в старых флоппиках.
Для чего он может пригодится спросите Вы? Из них выходят отличные генераторы переменного тока (спасибо Тесле), и без проблем переменный ток можно преобразовать в постоянный. А что самое интересное — переменний ток при выпрямлении можно умножать при помощи умножителя напряжения, о них расскажет ChipiDip:
Собрал по классической схеме удвоитель напряжения и подключил его к одной фазе двигателя:


Конденсаторов на 10 000 мкФ и лихвой хватит для роботы с моим шаговиком.

Диоды Шоттки имеют немного высший КПД нежели обычные кремниевые, потому я остановился на них. Мои диоды рассчитанные на ток 5 Ампер, так что спалить их не боюсь.
Крутнул несколько раз от руки и…

Попробуем сделать искру:
Накопившейся энергии в конденсаторах хватило даже на две.
Напряжение ушло выше 20-ти вольт, но не следует думать что выше 20 вольт это уже много, как видим энергия накопившаяся в конденсаторах несильно раскрутила компьютерный кулер. Как учили в школе, мощность (измеряется в Ваттах) это напряжение умножено на ток, ток же, небольшой, что можно будет увидеть на видео ниже:
Может от руки полученная мощность и небольшая но кулер крутится немного быстрей ежели через обычный мостовой выпрямитель, да и можно же собрать ещё один удвоитель и подключить его к второй свободной фазе и подсоединяя последовательно или параллельно можно удваивать ток или же напряжение.
Мой канал на ютюбе, подписывайтесь, дальше будет интересней.
> Купить в подарок или заказать уникальную вещь ПОДЕЛИТЕСЬ С ДРУЗЬЯМИ!

About HWman
- Минилодка на батарейках – 06.08.2014
- ¡ — Путепрокладчик «БАТ-М» – 07.12.2013
- ʘ — Дополнительное СО для видеокарты своими руками – 27.11.2013
- Шаговый двигатель от старого принтера как генератор – 12.08.2013
- Владельцам мультимедийных клавиатур посвящается – 10.08.2013
- Опыт создания солнечной зарядки для телефона в домашних условиях – 14.12.2012
- Мини турбина (генератор) своими руками – 04.12.2012
Навигация по записям
17 Replies to “Шаговый двигатель от старого принтера как генератор”
«Разобрав старый принтер мне достался вот такой красавец:»
Будьте добры, указывайте производителя и модель принтера…
можно сделать систему самоподпитки через два двигателя шагового и простого, первый выход питания с шагового двигателя питает (через удвоитель и можно ещё через литивый источник питания и миниредуктор ) обычный моторчик который крутит сам шаговый движок а второй выход как генератор нжной нам энергии которой можно пользоваться по своему усмотрению. Буду пробовать как найду нужные компоненты.
Очень круто, никогда раньше не слышал о умножителях электричества, теперь буду знать)))
Хорошая заметка в пользу альтернативных источников энергии из подручных средств. Из шагового двигателя так же можно сделать мини-ветрогенератор и заменить динамомашину велосипеда. Оставлю схему выпрямителя для шагового двигателя, может кому пригодится. Успехов в самоделках!

а якщо на виході 5 проводів?
Интересная статейка! Если найду такой двигатель, повторю твою самоделку.
а флопике может быть ?
В очень старых точно да.
Разобрал уже два принтера- шаговых движков не нашел((( Всюда обычные коллекторные и оптический датчик(
Кстати, у шаговиков отличительная черта — крутятся как бы рывками.
Так как шаговики имеют больше ресурс чем коллекторник то вполне логично класть коллекторник, он сдохнет быстрей соответственно и клиент пойдёт и купит новый принтер… это бизнес, в старых видимо качество выше чем сейчас, что печально.
А где еще могут быть шд? кроме магазина)))
Похожий как тут есть в 5,25 флоппи-дисководах
Сканеры, старые пристарые винчестеры.
Очень интересно и познавательно.Спасибо.
Добавил тег. Отличная обучающая статья!
Вот как нужно было…
Тэг «далее» нужен.
Добавить комментарий Отменить ответ
Рубрики
Похожие мозгоподелки:
Свежие комментарии
- sfm к записи Как оцифровать негативы своими руками
- sfm к записи Как сделать лодочный электромотор своими руками
- sfm к записи Счетчик электроэнергии на Arduino своими руками
- alexlevchenko к записи Счетчик электроэнергии на Arduino своими руками
- sfm к записи Счетчик электроэнергии на Arduino своими руками

Метки
Your browser doesn’t support canvas.
Горячий ТОП за месяц





























































МозгоЧины – сообщество для энтузиастов технического творчества © 2010 – 2018
Эксперимент с шаговым двигателем Mitsumi от лазерного принтера.
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Как-то раз достался мне (абсолютно безвозмездно) хладный труп лазерного принтера.
Принтер был разобран на органы, ценного и полезного для rep-rap-а в нем ничего не нашлось, кроме пожалуй шагового двигателя Mitsumi M49SP-1. Польза в котором сомнительная.

Погуглил, двигатель вроде достаточно мощный. Один весомый минус – шаг в 7,5 градусов.
После раздумий куда его применить, пришла в голову мысль попробовать его в качестве привода экструдера принтера. В качестве эксперимента. Нормальные, обычные Nema17 шаговики у меня есть в некотором количестве,

но вот захотелось поэкспериментировать. Стало интересно, мысль овладела головой и руками.
Еще подумалось что микрошаг 32 ситуацию с шагом в 7,5 градусов слегка улучшит.
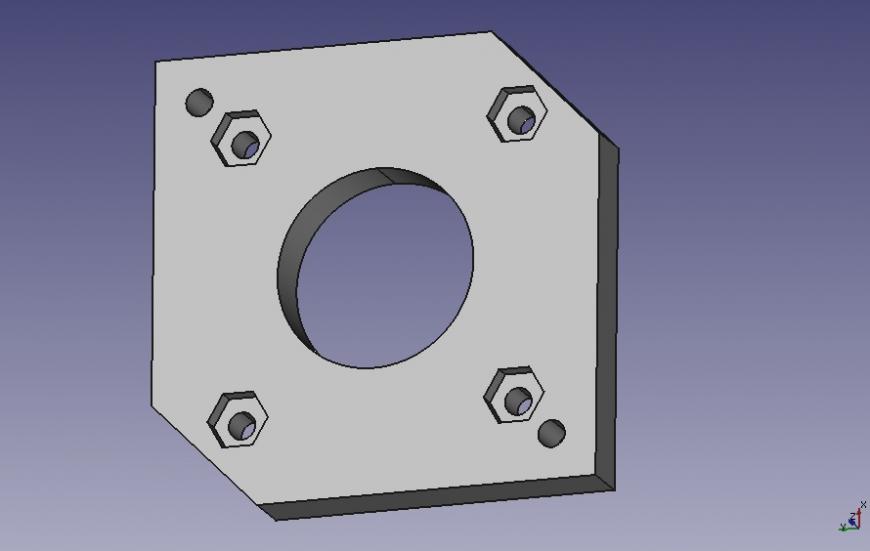
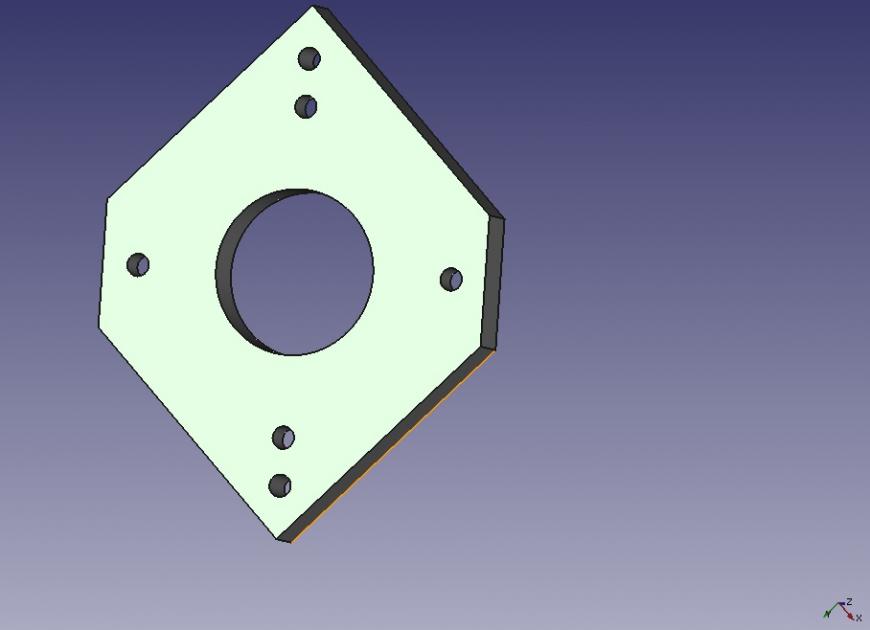
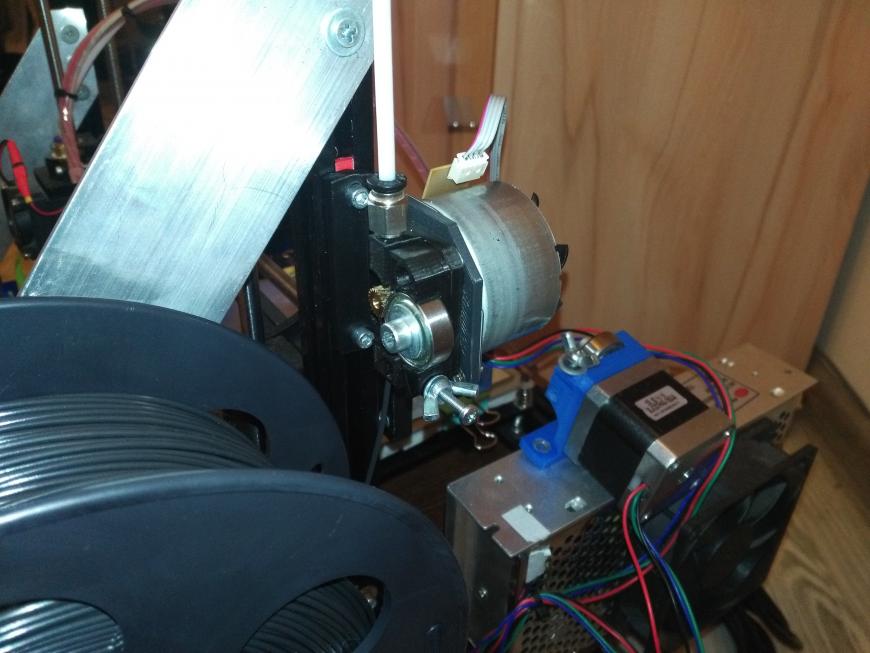
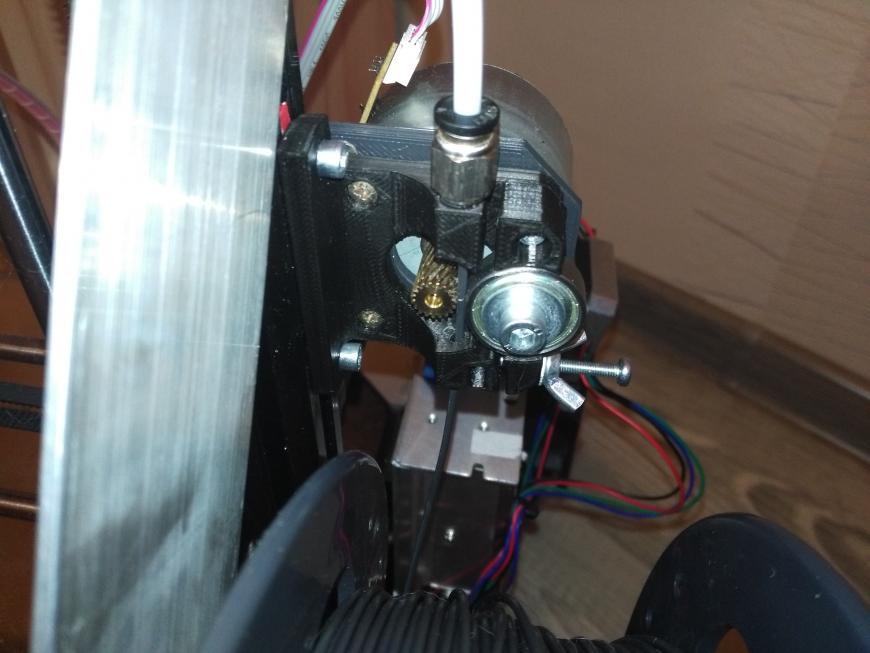
Спроектировал во FreeCAD-е и распечатал переходную пластину с закладными гайками м3 с этого мотора на nema17.


Родную шестерню не удалял, зубчики достаточно острые и по идее должны вполне цепляться за пруток.
Распечатанный экструдер у меня уже был, печатал остатками китайского пла.

С моим принтером пришел такой же, только литой. А модельку случайно нашел на тинге и распечатал в некотором количестве.
Собрал монстр-экструдер воедино.


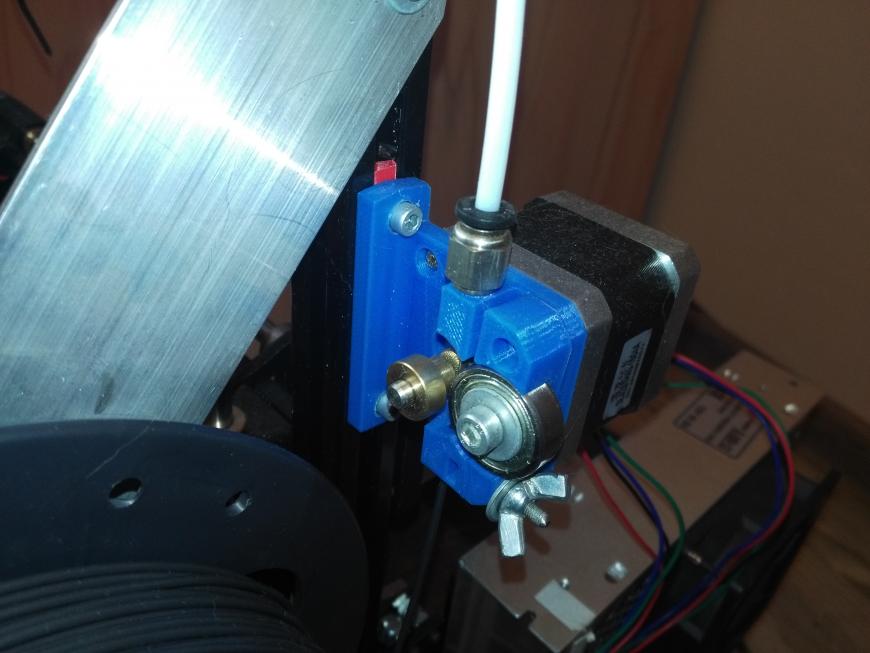
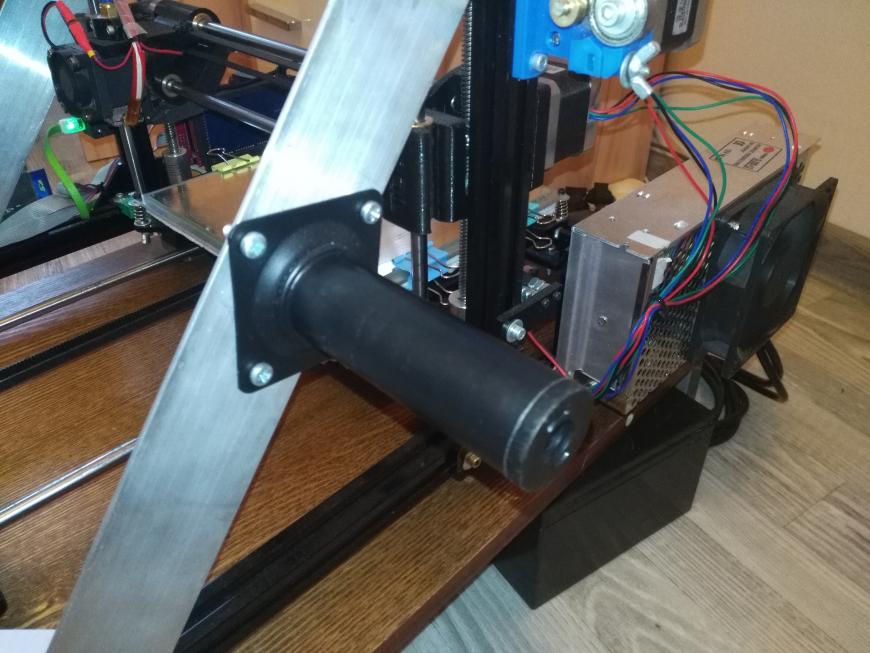
Ножка из Леруа Мерлен на укосине.
А в катушку распечатал вот такие вставки и стопор.




Ток выставил экспериментально, чтоб мотор крутился и не пропускал шаги под нагрузкой.
Экспериментально определил количество шагов на 1см.
Тестовая печать прямоугольного столба в 2 стенки.
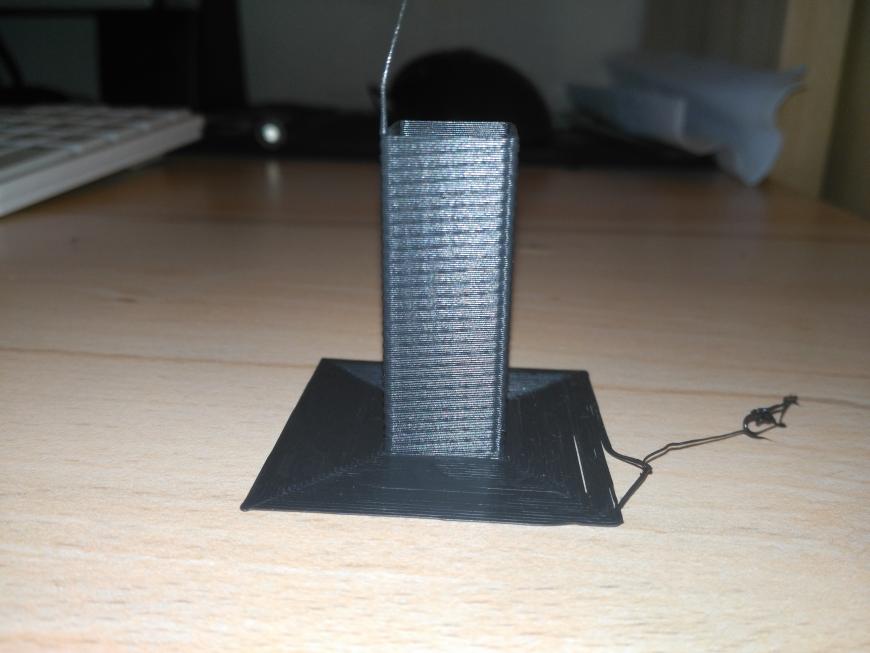
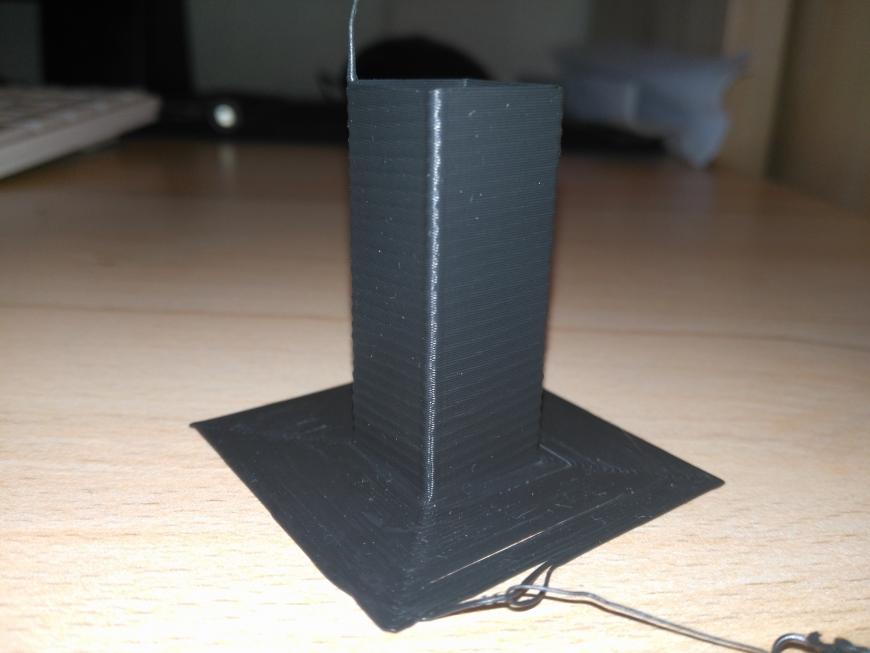
. дала вот такие занимательные артефакты.
Оно даже печатает, но при печати мотор разогрелся.
В общем для прямого привода моторчик явно не годится. 🙂
Надо попробовать собрать экструдер с редуктором или с ременной передачей.
Прекрасно понимаю что все это блажь и баловство, не заменит этот моторчик хорошо работающий nema17 17hs4401.
Подытожу: не каждый эксперимент удачный, зато в процессе приобретается бесценный опыт 🙂
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Управление шаговым двигателем с помощью Arduino
В этом посте я постараюсь вкратце рассказать про шаговые электродвигатели, и как с ними можно работать с помощью нашего любимого ардуино.
Многие из вас знакомы с маленькими моторчиками, из которых исходят всего 2 провода, они часто встречаются в детских игрушках, например, в машинках.
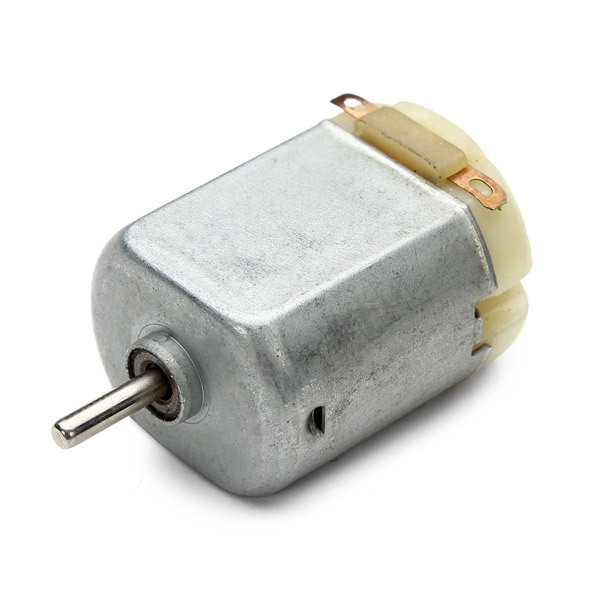
Это коллекторные электродвигатели постоянного тока. Они могут напрямую подключатся к источнику питания и будут всегда вращаться с постоянной скоростью, в зависимости от подаваемого напряжения. Если необходимо изменить направление вращения, то на нашем моторе нужно просто поменять местами “+” и “-” и он сразу начнёт крутиться в другую сторону. За счёт их простой конструкции, они имеют небольшую стоимость и простоту в управлении.
Но есть ещё один из распространенных типов двигателей – это шаговые электродвигатели.
Вы могли их встречать, если разбирали CD-DVD привода, жёсткие диски, принтеры или другие электронные устройства, в механической части которых нужно чётко контролировать обороты, перемещения или другие необходимые кинематические движения.
Вот так выглядит шаговый электродвигатель с винтовым валом из оптического привода:

Как видно – здесь уже больше, чем 2 провода и напрямую подключить такой мотор к источнику питания просто так не получиться из-за совсем другой конструкции самого двигателя. Если для нашего первого моторчика достаточно было подать “+” и “-” на соответственные клемы и он начинал вращаться, то для шагового электродвигателя нужно подавать цифровые электронные сигналы управления, которые будут сообщать двигателю на сколько и в какую сторону ему необходимо вращаться. Это возможно осуществить с помощью устройства, которое будет генерировать и отправлять эти сигналы на драйвер, а он, в свою очередь, напрямую управлять обмотками двигателя.
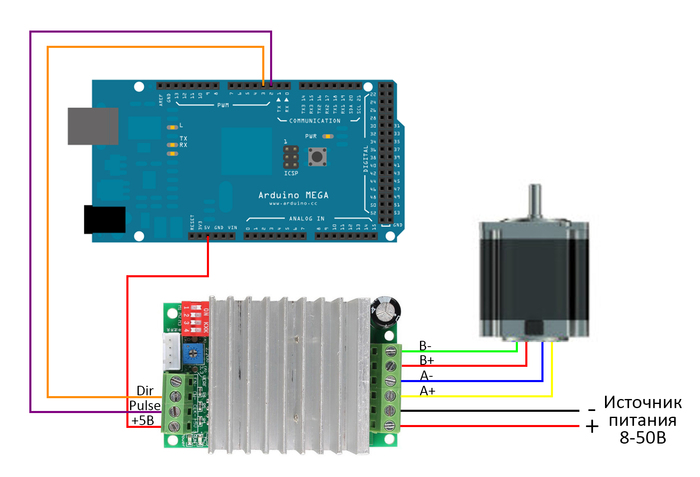
Мы рассмотрим пример, как подключить шаговый электродвигатель к Arduino Mega 2560 – именно оно и будет тем устройством, которое генерирует нужные электронные сигналы управления.
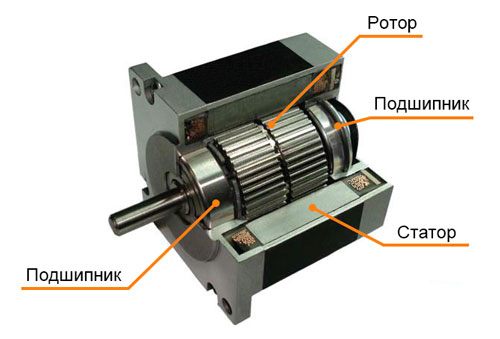
Я взял мотор формата Nema 17 – это гибридный шаговый двигатель, который часто встречается в 3Д принтерах, ЧПУ системах, робототехнике и т.д.
Фото двигателя в разрезе:
Драйвер на микросхеме TB6600 – это довольно неплохой контроллер, который можно использовать с двигателями до 4.5 А, 50 В. Для домашних 3Д принтеров и ЧПУ систем его полностью достаточно.
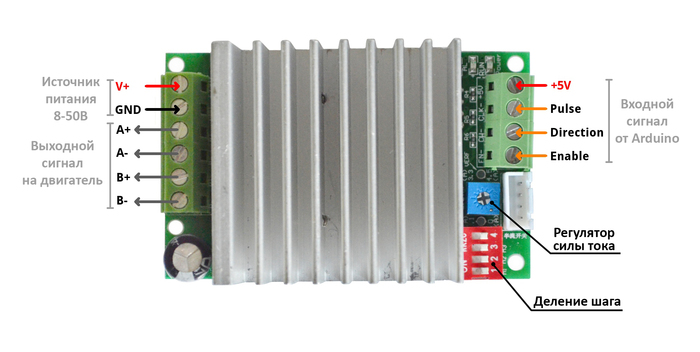
Чтобы драйвер работал, необходим внешний источник питания с напряжением 8-50 В (рекомендуется 36 В). Именно с него наш двигатель будет получать энергию для своей работы. А логические сигналы Dir – направление вращения и Pulse – сигнал шага, драйвер будет получать от ардуино.
У данного двигателя 4 обмотки: A+, A-, B+, B-, их нужно соединить с соответствующими выходами на плате драйвера.
Для управления шаговым двигателем можно использовать различные библиотеки, которые упрощают жизнь, если необходимо как-то динамически управлять двигателем, например “AccelStepper” и тому подобные. Также есть различные программные комплексы для управления 3Д принтерами или ЧПУ станками.
Мы же рассмотрим простой пример вращения двигателя с постоянной скоростью, который не сложно будет повторить всем желающим. Также, так ещё удобно проверять общее состояние двигателя.
Здесь написан цикл, который беспрерывно будет отправлять логические сигналы к нашему драйверу, а он уже на двигатель.
Примерно так всё работает:
P.S. Сильно в теорию я не вдавался, потому что на это нужен не один пост, да и не всем она понравится 🙂

P.S. Сильно в теорию я не вдавался, потому что на это нужен не один пост, да и не всем она понравится 🙂
Почему хотя бы не рассказать об отличиях униполярного от биполярного двигателя? Почему не привести схему модуля(хотя бы из даташита на микросхему)?
Ладно упущен режим микрошага, но основу то можно было скопипастить написать.
Зачем было использовать ардуину? Много нагляднее было бы пару кнопок повесить.
Спасибо за совет, в будущем буду стараться поместить всё в один пост.
Зачем было использовать ардуину? Много нагляднее было бы пару кнопок повесить.
Не совсем понял вопрос
Просто хотелось показать пример именно с ардуино, ведь с ним можно открыть больше возможностей, чем просто “отправлять шаг”.
Ребят, вижу тут есть знающие люди.
Собираю фотопиццу (мало ли кто знаком), не крутит шаговый двигатель, бывает после танцев с бубном крутит, но очень странно (не по программе).
Драйвер шагового двигателя менял – не помогло
В чем может быть проблема?
а будет электрическая схема? =) мотор гудит когда не крутится?
Нет, он может включаться раза с 5-6, тогда и гудит и крутит (херово но крутит), как будто где-то плохой контакт, хотя менял провода, прозванивал – все в порядке.
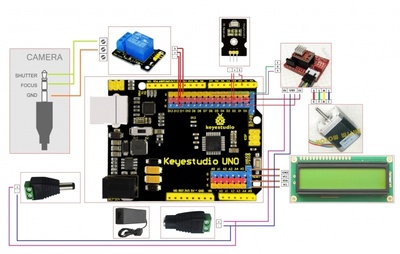
По этой схеме делал, только у меня шиелд а тут просто экран.
@BesttseB, проверь код, а именно повнимательнее, где задается частота импульсов. Возможно слишком большая частота импульсов, движок просто ахреневает. Попробуй отдельно протетстить шаговик+МК+твой код, без обвеса. У меня было, что движок сначала разгонялся, потом из-за большой частоты стопорился и когда уменьшалась, то он снова продолжал крутиться.
Автор показывает, как быстро и равномерно крутится шаговый двигатель. Ясно. Понятно. Тема раскрыта на 10 из 10.
а обязательно покупать эту здоровую мандулу? DRV8825 прекрасно справляется с шаговиками до NEMA17 включительно и стоит в несколько раз дешевле + под них на ардуины есть такиеже дешманские шилды – например ардуино 2560 + шилд + 5 драйверов = 1050рублей на али
4988 не то, чтобы хуже, но в DRV8825 можно микрошаг поменьше поставить(актуально для станков с ременнойзубчатой передачей и 3D принтеров) и, как мне кажется, на DRV8825 шаговики звучат благороднее =)
Не конечно, для каждой цели целесообразен тот или иной драйвер. Просто у меня был в наличии только этого формата (остался после ЧПУ системы: https://youtu.be/N3xBpIMORf4 )
Точно, две обмотки А и Б, соответственно + и – на каждой обмотке.
Спасибо, что нашёл ошибку, она как-то автоматически получилась – вижу четыре буквы на плате – пишу, что четыре обмотки)
Если бы копипастил, то думаю, что не сделал такую глупую ошибку, с головы старался писать.
а можно статью про то, как с компа управлять этим всем. желательно с кодом.
т.е., допустим, мне надо,чтобы после нажатия кнопки на компе, двигатель совершал серию поворотов. как это программируется?
Serial гугли. С компа посылаешь строку на ардуину, она разбирает её и выполняет команду по аргументам.
а с компа в зависимости от языка просто посылаешь в серийный порт строку.
Аргументы придумать не сложно.
Можно заморочиться с wi-fi или ethernet shield, там поднять веб-сервер и из браузера делать запросы. Например, NodeMCU умеет из коробки это, т.к. на ней встроен в-ф
такое ощущение, что автор и рад бы нам рассказать о шаговиках, но не разбирается в теме абсолютно. вешать NEMA17 на такой монструозный драйвер? перепутать количество обмоток? использовать такой дикий метод управления?
хотя бы схему шаговика в пэинте нарисовали, авось сами разобрались бы, как он работает.
Похоже, этим драйвером мотор от сидюка не запустишь – напряжение слишком высокое. У мотора +5в, а питание драйвера от 8 в начинается.
Вот расскажите мне как вы к этим двигателям приделываете достойно какую нибудь звездочку или сверлышко?
. ну т.е. у меня на одном таком движке было по маркировке до 38V и 3А максимальная подача (оптимальное 12V & 1.5A), где то около 30V&3A подавал. Как бы я не крепил это сверло, болтами, суперклеем, и тем и тем, эпоксидкой также вместе взятой и т.д. и т.п. в т.ч. и резал/сверлил это чертову маленькую ось, чтоб хоть как в неё вцепиться (по сути надо было его в таком режиме использовать весьма недолго, так что должно было быть норм), всё срывало! . если застревало хоть в мало-мальски не протачиваемом проёме, т.к. крутилось бешено, то даже небольшое торможение со временем всё равно давало срыв и приходилось монтажить заново. Да конечно я и искал напряжение оптимальное, но это либо получалось дико долгое сверление, которое добивало, либо срывало.
Вот как вы за такую ось цепляетесь нормально? . такая ж мелкая сволочь.
..Эпоксидка блин, ну ты даёшь)

ааа оказывается это цангой называется) а я её получается самодельную делал из болтов, еще и моментов поверх заливал, тоже срывало (
И да еще когда звездочку надевал, то хотелось бы чтоб при сильной нагрузке она бы просто становилась вместе с осью и тянуло бы, и можно было бы в зависимости от того на сколько ей тяжело тянуть, то увеличивать нагрузку тока, то уменьшать, а так получается ты ей увеличиваешь нагрузку и эта ось еще и нафиг просверливает в твоей звездочке еще большую дырень, также из-за того само греется от дикого трения тоже. И там вообще мне ничего не помогало. Оставался только один вариант – согнуть её, но побоялся ибо эта хрень во первых маленькая, тут еще умудриться надо, а потом еще не факт что к согнутой удастся правильно примонтажить то, что нужно так, чтобы оно крутилось не со смещенным центром.
Короче сейчас уже прикупил двигатели то с нормальными осями, прям выплавленные стальные звездочки уже там. Но вопрос меня мучить не перестал, ибо таких движков на рынке ну просто валом, а тот нормальный я еле достал, а где и как нормально использовать бы можно было те движки я так и не понимаю, только разве что для игрушек?) ну или просто чтоб лишь бы прихватить.
Есть ещё один вариант – запрессовка шестерней.
Держит намертво, промышленный стандарт
Вот тут можно увидеть пример, показывают два стандарта установки шестерней на вал –
2)посадочное место (щлиц на валу)
Ну вот посадочное место само то, его мне по сути только и оставалось сделать, только надо будет, если начну опять такое делать, не напильником, а молотком квадратик с оси набить и потом уже болтами хвататься.
Но это хорошо, когда еще ось хоть как то нормально торчит, а есть у меня еще одно, даже для меня, исключение (вот там прям с кулак моторчики были) мелочь 2,5-3 см с осью на 1,2 в диаметре убийца до 50 вольт можно подрубать – это жесть! Я на обычные по 20 вольт выставляю и потом руки трясутся после них (ну бывает в руках держишь тестируешь, что будет если зажать шестеренку или еще что или тупо смотришь на его работу, зависнешь или любуешься или и то и то:D). А на того зверя дал 50 вольт, да у меня чуть зубы не повыпадали! 😀
(нет ебом меня не токнуло), но эта хрень в руках тряслась так, что я думал второй адронный коллайдер запустил только что и сейчас он у меня в руке образует черную дыру, и трёх секунд он не дал мне его удержать (да я его даже отключить не успел), выпрыгнул из руки оторвал контакты и с помощью своего гироскопического эффекта весьма точно впился в пол, так еще и остатками момента кручения сделал в нем небольшую дырку.
Сказать, что я офигел, это ничего не сказать. После такого я положил его подальше и решил использовать только в реально экстренных случаях)
К двигателям с нормальными осями обычно бывают цанги типа ERxx, напримем ER11 на шпиндели с валом 6мм
Шаговики как шпиндель использовать некорректно – у них крутящий момент сильно падает с увеличением скорости
ну увы ( я ж говорю, что было тогда под рукой
ну как сказать =) на 2500-3500 обмин его не хватает даже чтобы мотор без нагрузки крутить(если мы говорим про “обычные” шаговики)
УПРАВЛЕНИЕ ШАГОВЫМ ДВИГАТЕЛЕМ
Шаговые двигатели присутствуют в автомобилях, принтерах, компьютерах, стиральных машинах, электробритвах и многих других устройствах из повседневного быта. Однако многие радиолюбители до сих пор не знают, как заставить такой мотор работать и что он вообще из себя представляет. Итак, давайте узнаем, как использовать шаговый двигатель.
Шаговые двигатели являются частью класса моторов, известных как безщеточные двигатели. Обмотки шагового двигателя являются частью статора. На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала. Все коммутации производятся внешними схемами. Обычно система мотор — контроллер разрабатывается так, чтобы была возможность вывода ротора в любую, фиксированную позицию, то есть система управляется по положению. Цикличность позиционирования ротора зависит от его геометрии.

Типы шаговых двигателей
Существуют три основных типа шаговых двигателей: переменной индуктивности, двигатели с постоянными магнитами, и гибридные двигатели.
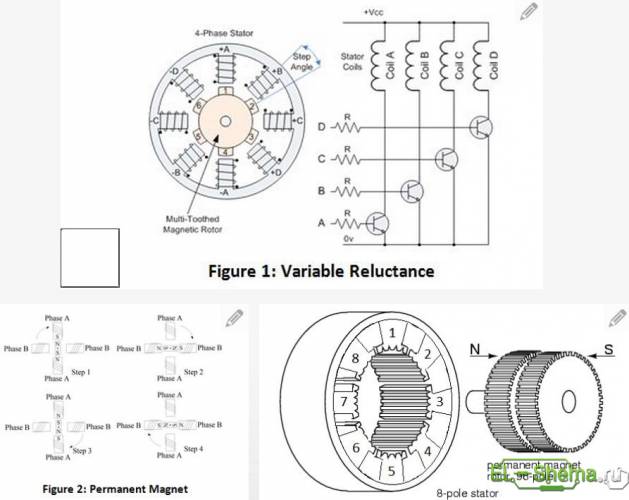
Двигатели переменной индуктивности используют только генерируемое магнитное поле на центральном валу, заставляющее вращаться и находиться на одной линии с напряжением электромагнитов.
Двигатели с постоянными магнитами похожи на них, за исключением того, что центральный вал поляризован у северного и южного магнитных полюсов, которые будут соответствующим образом поворачивать его в зависимости от того, какие электромагниты включены.
Гибридный мотор — это сочетание двух предыдущих. У его намагниченного центрального вала имеется два набора зубов для двух магнитных полюсов, которые затем выстраиваются в линию с зубами вдоль электромагнитов. В связи с двойным набором зубов на центральном валу, гибридный двигатель имеет наименьший доступный размер шага и поэтому является одним из наиболее популярных типов шаговых двигателей.
Униполярные и биполярные шаговые двигатели
Также существует ещё два типа шаговых двигателей: униполярные и биполярные. На фундаментальном уровне, эти два типа работать точно так же; электромагниты включены в последовательном виде, заставляя центральный вал двигателя вращаться.
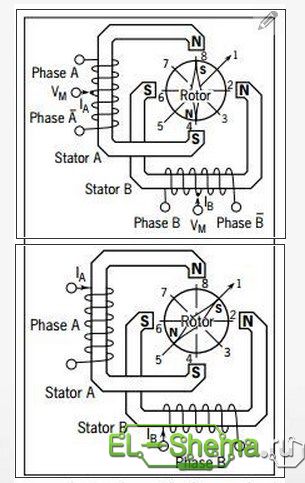
Но униполярный шаговый двигатель работает только с положительным напряжением, а биполярный шаговый двигатель имеет два полюса — положительный и отрицательный.
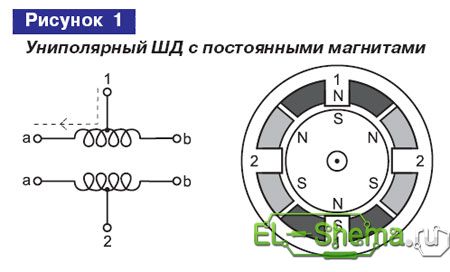
То есть фактическая разница между этими двумя типами заключается в том, что для однополярных требуется дополнительный провод в середине каждой катушки, что позволит току проходить либо к одному концу катушки, либо другому. Эти два противоположных направления производят две полярности магнитного поля, фактически имитируя как положительные, так и отрицательные напряжения.
Хотя оба они имеют общий уровень питающих напряжений 5V, биполярный шаговый двигатель будет иметь больший крутящий момент, потому что ток течет через всю катушку, производя более сильное магнитное поле. С другой стороны, униполярные шаговые двигатели используют только половину длины катушки из-за дополнительного провода в середине катушки, а значит меньший крутящий момент доступен для удержания вала на месте.
Подключение шаговых двигателей
Разные шаговые двигатели могут иметь разное количество проводов, как правило, 4, 5, 6, или 8. 4-х проводные линии могут поддержать только биполярные шаговые двигатели, поскольку у них нет центрального провода.
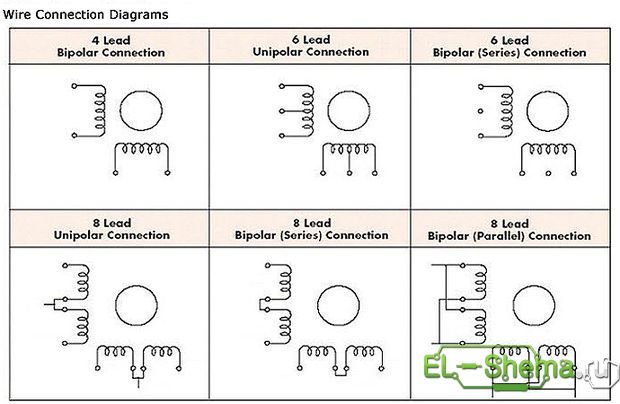
5-ти и 6-ти проводные механизмы могут быть использованы как для однополярного, так и биполярного шагового двигателя, в зависимости от того, используется центральный провод на каждой из катушек или нет. 5-ти проводная конфигурация подразумевает, что центральные провода на два комплекта катушек соединены внутри между собой.
Способы управления шаговыми двигателями
Есть несколько различных способов управления шаговыми двигателями — полный шаг, полушаг, и микрошаговый. Каждый из этих стилей предлагают различные крутящие моменты, шаги и размеры.
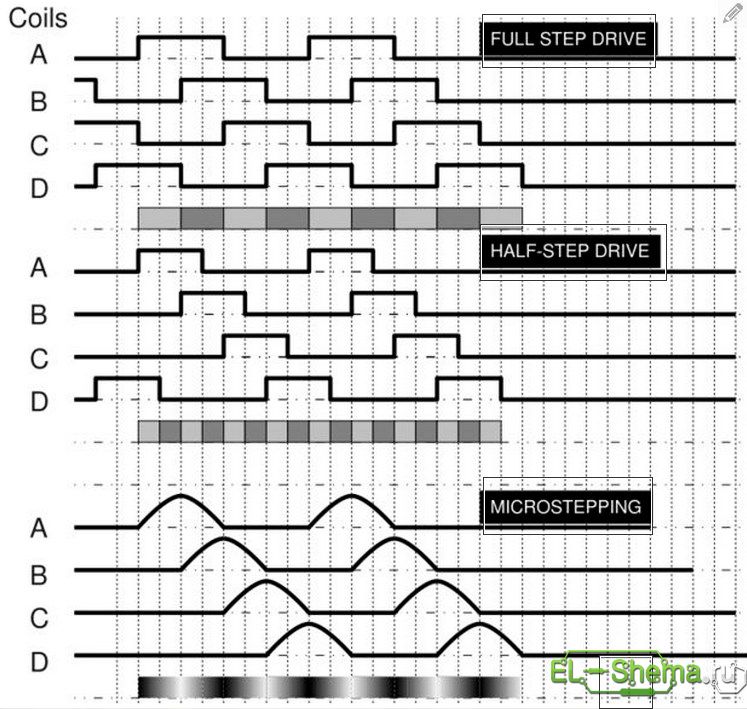
Полный шаг — такой привод всегда имеет два электромагнита. Для вращения вала, один из электромагнитов выключается и далее электромагнит включен, вызывая вращение вала на 1/4 зуба (по крайней мере для гибридных шаговых двигателей). Этот стиль имеет самый сильный момент вращения, но и самый большой размер шага.
Полшага. Для вращения центрального вала, первый электромагнит находится под напряжением, как первый шаг, затем второй также под напряжением, а первый все еще работает на второй шаг. При третьем шаге выключается первый электромагнит и четвертый шаг — поворот на третий электромагнит, а второй электромагнит по-прежнему работает. Этот метод использует в два раза больше шагов, чем полный шаг, но он также имеет меньший крутящий момент.
Микрошаговый имеет наименьший размер шага из всех этих стилей. Момент вращения, связанный с этим стилем, зависит от того, как много тока, протекает через катушки в определенное время, но он всегда будет меньше, чем при полном шаге.
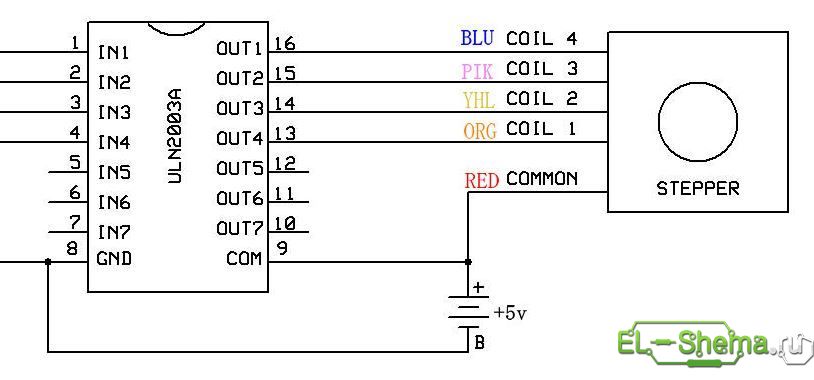
Схема подключения шаговых двигателей
Чтобы управлять шаговым двигателем необходим контроллер. Контроллер — схема, которая подает напряжение к любой из четырех катушек статора. Схемы управления достаточно сложны, по сравнению с обычными электромоторчиками, и имеют много особенностей. Подробно рассматривать тут мы их не будем, а просто приведём фрагмент популярного контроллера на ULN2003A.
В общем шаговые двигатели являются отличным способом для того, чтобы повернуть что-то в точный размер угла с большим количеством крутящего момента. Другое преимущество их в том, что скорость вращения может быть достигнута почти мгновенно при изменении направления вращения на противоположное.





